Krótko o zasilaczach
Aby każde urządzenie elektryczne mogło poprawnie działać, należy je właściwie zasilać energią elektryczną. Źródła energii elektrycznej są w zasadzie jej przetwornikami, przetwarzają one bowiem inny rodzaj energii w energię elektryczną. Przykładami takich źródeł są małe baterie elektryczne oraz ogromne elektrownie. Nie każde źródło energii elektrycznej może być wykorzystywane do bezpośredniego zasilania różnego rodzaju urządzeń elektrycznych. Powodem takiego stanu rzeczy jest fakt, iż energia elektryczna powinna być dostarczana do danego urządzenia elektrycznego zgodnie z jego specyfikacjami, jeżeli nie będziemy się do nich stosować, urządzenie elektryczne może ulec trwałemu uszkodzeniu.
Najważniejszymi z wymagań, które określają źródła energii elektrycznej są:
- określona stałość napięcia,
- odpowiednia postać energii elektrycznej,
- właściwa wydajność prądowa, co wiąże się z mocą danego źródła,
- mała masa oraz rozmiary,
- długotrwała praca,
- znikome zagrożenie dla otaczającego nas środowiska,
- powszechna dostępność.
Wymienione wymagania w szerokim zakresie spełniają pewne rodzaje baterii elektrycznych, na przykład baterie elektrochemiczne, które są obecnie szeroko stosowane w zasilaniu przenośnych urządzeń elektronicznych. Do zastosowania w urządzeniach stacjonarnych najbardziej dogodnym i ekonomicznym źródłem energii elektrycznej jest sieć elektryczna. Należy jednak mieć na uwadze, że dostarcza ona prądu przemiennego, który musi być przetworzony na prąd stały, bowiem jedynie taka postać może być używana do zasilania większości układów elektrycznych.
Opisywany proces przetwarzania energii elektrycznej prądu zmiennego w energię elektryczną prądu stałego ma miejsce w urządzeniu, który nazywamy sieciowym zasilaczem prądu stałego, lub popularnie: zasilaczem. Najpopularniejszym obecnie typem zasilaczy są zasilacze elektroniczne zbudowane przy wykorzystaniu powszechnie stosowanych elementów półprzewodnikowych jak diody, tranzystory, tyrystory, a także układy scalone. Czasami zachodzi potrzeba odpowiedniego przetworzenia prądu stałego o niewielkiej wartości napięcia w prąd stały o dużo wyższym napięciu. W tym celu używa się układów zwanych przetwornicami napięcia stałego lub popularnie: przetwornikami dc-dc. Jeżeli wymagane jest uzyskanie bardzo wysokiego napięcia do zasilenia układów, które pobierają małą moc, na przykład kineskopy, liczniki promieniowania, to stosujemy wówczas powielacze napięcia.
Zasilacze sieciowe stosowane w naszym kraju przetwarzają energię prądu zmiennego z sieci elektrycznej o napięciu skutecznym 230V i częstotliwości 50Hz, w energię prądu stałego o odpowiedniej wartości prądu lub napięcia. Przeznaczone są one najczęściej do zasilania urządzeń elektronicznych, mogą jednak służyć także do innych celów, na przykład do ładowania akumulatorów, napędów silników elektrycznych małej mocy itd. Powszechnie stosowane zasilacze napięcia stałego cechują się stałą wartością napięcia wyjściowego oraz prądem obciążenia, który zależy od poboru mocy przez odbiornik, czyli od jego rezystancji obciążenia. Rzadko w zastosowaniach domowych, częściej w laboratoryjnych i przemysłowych, stosuje się zasilacze prądu stałego, czyli takie zasilacze, które dostarczają prąd stały o wartości zadanej do obciążenia. W tym wypadku napięcie na odbiorniku zmienia się w zależności od pobieranej mocy, czyli rezystancji odbiornika.
Zasilacze sieciowe mogą być budowane zarówno jako odrębne urządzenia jak również wspólnie z układami elektrycznymi, które mają zasilać. Do pierwszej grupy urządzeń należą zasilacze uniwersalne, które cechują się stałym lub regulowanym napięciem wyjściowym, często są urządzeniami posiadającymi wiele wyjść, oraz możliwą do prawidłowego zasilania obciążalnością prądową, zakresem temperatur oraz odpornością na zakłócenia. Zasilacze tego typu posiadają bardzo jednolite parametry, jak moc, napięcie wyjściowe i wejściowe oraz rozmiary. Stwarza to wiele korzyści, dzięki łatwości projektowania i konstrukcji urządzeń elektronicznych. Drugą grupę stanowią zasilacze, które przeznaczone są do sprzętu elektronicznego będącego w powszechnym użytku, jak również w zastosowaniach profesjonalnych, gdzie wspólna konstrukcja urządzenia wespół z zasilaczem umożliwia uzyskanie najlepiej dopasowanego do siebie układu. Są one również bardzo zróżnicowane, biorąc pod uwagę budowę, rozwiązania układowe, parametry, rozmieszczenie elementów oraz cenę.
Najważniejsze parametry oraz elementy składowe zasilaczy
Symbol blokowy zasilacza sieciowego

Do najbardziej istotnych parametrów użytkowych zasilaczy elektronicznych należą:
- wartość skuteczne napięcia zasilającego,
- częstotliwość napięcia zasilającego,
- wartość średnia napięcia wyjściowego, czyli składowa stała tego napięcia,
- maksymalny prąd obciążenia, a co za tym idzie maksymalna moc, która może wydzielać się na obciążeniu,
- wartość napięcia tętnień na wyjściu, czyli parametr zwany pod nazwą współczynnika tętnień,
- impedancja wyjściowa,
- współczynnik stabilizacji napięcia,
- warunki eksploatacji zasilacza, zwłaszcza dopuszczalny zakres temperatury otoczenia i wilgotność powietrza.
Bardzo ważna jest również wyjściowa charakterystyka obciążeniowa zasilacza, która przedstawia zależność napięcia wyjściowego od wyjściowego prądu zasilacza. Charakterystyka ta jest pokazana na poniższym rysunku.
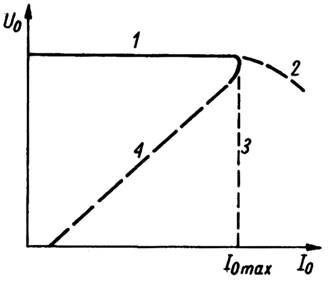
Cyframi oznaczono charakterystyki wyjściowe zasilacza w następujących przypadkach:
- gdy I0 £ I0max,
- gdy doszło do przeciążenia, takiego jak zwarcie, w przypadku gdy zasilacz nie jest wyposażony w ograniczenie nadprądowe,
- gdy doszło do przeciążania, a zasilacz jest wyposażony w ograniczenie stałe,
- gry doszło do przeciążania, a zasilacz jest wyposażony w ograniczenie progresywne.
Poniższy wykres ilustruje schemat przebiegu napięcia wyjściowego w funkcji czasu

W konstrukcji każdego zasilacza newralgiczną rolę pełni układ prostowniczy. Układ prostowniczy służy do przekształcania prądu zmiennego na prąd jednokierunkowy, jak sama nazwa wskazuje: prostuje przebieg napięciowy. Poza układem prostowniczym w skład zasilacza elektronicznego wchodzi także transformator, odpowiedni filtr wygładzający, stabilizator oraz układy i elementy zabezpieczające. Transformator pełni rolę dopasowania napięć zasilających oraz odizolowania obwodów zasilanych z sieci elektrycznej od obwodów zasilanego urządzenia elektrycznego. Filtr wygładzający, którego przykładem jest zwykły układ całkujący, służy do tłumienia tętnienia czyli składowej zmiennej napięcia które jest na wyjściu układu prostowniczego. Główną rolą stabilizatora jest odpowiednie utrzymywanie napięcia wyjściowego na stałym poziomie, pomimo wystąpienia pewnych czynników zakłócających. Najprostszym elementem, który chroni zasilacz przed uszkodzeniami, mogącymi powstać z powodu wydzielania się na nim zbyt wielkiej mocy, jest bezpiecznik topikowy. Nie jest on jednak zawsze skutecznym zabezpieczeniem, w przypadku niewielkich przeciążeń lub przepięć, koniecznym staje się stosowanie odpowiednich układów zabezpieczających.
Ze względu na sposób działania, związany głównie z rodzajem użytego stabilizatora napięcia, zasilacze dzielone są na dwie główne grupy:
- zasilacze wyposażone w stabilizator o działaniu ciągłym, które nazywane są popularnie zasilaczami stabilizowanymi,
- zasilacze wyposażone w stabilizator impulsowy, które nazywane są popularnie zasilaczami impulsowymi.
Blokowo - funkcjonalny schemat elektronicznego zasilacza sieciowego wyposażonego w
stabilizator o działaniu ciągłym

Każda z wymienionych wcześniej grup zasilaczy różni się od siebie w istotny sposób budową oraz właściwościami. W zasilaczu stabilizowanym przedstawionym na schemacie powyżej napięcie zmienne sieci elektrycznej przetwarzane jest w ciągły sposób w kolejnych blokach zasilacza, aż do momentu uzyskania napięcia stałego którym zasilany jest odbiornik. Najlepsza stabilizacja napięcia wyjściowego oraz najmniejsze tętnienia i mała impedancja wyjściowa uzyskiwana jest właśnie w tego typu zasilaczach. Cechą niekorzystną jest stosunkowo mała sprawność tych zasilaczy, która oscyluje w granicach 30 - 40%, wynika ona z dużych strat mocy na elemencie regulacyjnym stabilizatora.
Układy prostownicze
Ważnym elementem zasilacza stabilizowanego jest układ prostowniczy, który służy do prostowania prądu zmiennego w jednokierunkowy pulsujący prąd, zwany prądem wyprostowanym. Istotną rolę w działaniu układu prostowniczego odgrywa element prostowniczy. Jednostka ta charakteryzuje się wyraźną asymetrią rezystancji, która zależy od biegunowości doprowadzanego do niej napięcia. Rezystancja ta jest bardzo mała dla kierunku przewodzenia elementu prostowniczego oraz bardzo duża dla kierunku zaporowego. Powszechnie stosowanym we współczesnych układach prostowniczych małej mocy elementem prostowniczym jest dioda półprzewodnikowa. Sterowane elementy prostownicze, takie jak tyrystory, stosuje się zazwyczaj w układach prostowniczych dużej mocy. Przeznaczone są one do zasilania urządzeń energetycznych.
Trzy podstawowe diodowe układy prostownicze

Na powyższym rysunku zostały przedstawione trzy podstawowe diodowe układy prostownicze wraz z odpowiadającymi im czasowymi przebiegami prądów i napięć na wyjściu i wejściu układu. Założone zostało, że obciążanie zasilacza jest czysto rezystancyjne, zaś diody prostownicze i transformator są idealnymi elementami. Najprostszy układ prostowniczy przedstawiony na rysunku a) zawiera pojedynczą diodę półprzewodnikową. Kiedy zmienne napięcie zasilania ma wartość dodatnią +UZ, dioda znajduje się w stanie przewodzenia, a anoda spolaryzowana jest dodatnio względem katody. Przez obwód płynie prąd I0, który powoduje odłożenie na rezystorze RL napięcia o wartości identycznej jak napięcie zasilania UZ o biegunowości identycznej jak na rysunku. Zakładamy przy tym, że dioda jest idealna i spadek napięcia na niej w kierunku przewodzenia jest równy zero. Kiedy zmienne napięcie zasilania ma wartość ujemną -UZ, dioda znajduje się w stanie zaporowym, a anoda spolaryzowana jest ujemnie względem katody. W związku z tym prąd nie płynie w obwodzie, a całość napięcia zasilania odkłada się na diodzie. Z uwagi na to, że prąd obciążenia płynie w czasie jednej połowy okresu nazywa się go jednopołówkowym lub półokresowym. Układ dwupołówkowy, pełnookresowy cechuje się tym, że prąd jest dostarczany do obciążenia w czasie obu półokresów zmiennego napięcia zasilania.
Prostowniczy układ pełnookresowy, przedstawiony na rysunku b), można rozpatrzeć jako układ złożony z dwóch jednopołówkowych prostowników, połączonych w ten sposób, że obie diody D' i D'' kolejno przewodzą prąd w następujących po sobie półokresach napięcia zasilania: UZ' i UZ''. Wypadkowy prąd I0 stanowi sumę prądów składowych obu prostowników, natomiast spadek napięcia U0 powstały na rezystancji obciążenia RL, który jest tym prądem wywołany, posiada kształt i biegunowość pokazane na rysunku.
Prostowniczy układ mostkowy, którego przykładem jest układ Graetza, jest przedstawiony na rysunku z oznaczeniem c). Zawiera on w sobie cztery diody: D1, D2, D3, D4 połączone w taki sposób, że w każdej chwili dwie z nich przewodzą, tym samym dostarczając prąd do obciążenia, natomiast pozostałe dwie są w stanie zaporowym i nie przewodzą. Na przykład, jeśli w dodatniej połówce napięcia zasilania +UZ przewodzą zarówno diody D1 jak i D3, to w połówce ujemnej napięcia zasilania -UZ przewodzą diody D2 i D4. W wyniku tego zarówno prąd, który płynie przez obciążenie, jak i spadek napięcia, który on wywołuje na rezystancji obciążenia, posiadają w obu połówkach takie same kierunki.
Parametry układu prostowniczego w dużej mierze zależą od liczby i rodzaju elementów prostowniczych, a także od sposobu zasilania, czyli sposobu połączenia uzwojeń zasilającego transformatora, liczby faz napięcia zasilania, oraz rodzaju obciążenia, czyli obciążenia rezystancyjnego i reaktancyjnego.
Najważniejszymi parametrami opisującymi działanie każdego układu prostowniczego są:
- średnia wartość napięcia wyprostowanego, czyli wyjściowego U0,
- skuteczne i maksymalna wartość napięcia zasilającego, czyli wejściowego U1,
- szczytowa, czyli maksymalna wartość napięcia wstecznego cechującego pojedynczą diodę D,
- podstawowa częstotliwość tętnień ft,
- sprawność napięciowa hU, która stanowi iloraz średniej wartości napięcia wyprostowanego oraz maksymalnej wartości napięcia zasilającego.
Poniższa tablica zawiera podstawowe parametry prostowniczych układów diodowych
|
Rodzaj układu prostowniczego
|
Półokresowy
|
Pełnookresowy
| |
|
Parametr
|
mostkowy
|
z wyprowadzonym środkiem uzwojenia wtórnego transformatora
| |
|
Napięcie zasilające (wartość skuteczna)
|
U
|
U
|
U (a)
|
|
Liczba diod
|
l
|
4
|
2
|
|
Napięcie wsteczne na pojedynczej diodzie (wartość maksymalna)
|
|
|
|
|
Napięcie wyprostowane (wartość średnia)
|
0,45 U
|
0,9 U
|
0.9 U
|
|
Częstotliwość podstawowa tętnień(b)
|
f
|
2f
|
2f
|
|
Sprawność napięciowa
|
0,318
|
0,637
|
0,637
|


a. napięcie odłożone na połowie uzwojenia wtórnego U'' = U' = U
b. określona wartością częstotliwości napięcia zasilającego f
Porównując powyższe układy można wysnuć wniosek, że pełnookresowy układ prostowniczy ma lepsze parametry niż półokresowy układ prostowniczy. Cechuje się bowiem większą wartością wyprostowanego napięcia, mniejszą częstotliwością podstawową tętnień oraz dwa razy większą sprawnością napięciową. Jednym z gorszych parametrów jest większa wartość wstecznego napięcia na pojedynczej diodzie w pełnookresowy układzie, którego środek uzwojenia wtórnego transformatora jest wyprowadzony. Kolejną niekorzystną cechą jest bardziej złożona konstrukcja samego układu, zawiera on bowiem większą liczbę diod, ponadto stosując transformator z wyprowadzonym środkiem uzwojenia wtórnego należy stosować droższy transformator zasilający o dwóch, symetrycznych względem siebie, uzwojeniach wtórnych.
Przedstawione na powyższym rysunku układy prostownicze charakteryzują się stosunkowo dużymi tętnieniami wyprostowanego napięcia. Współczynnik tętnień t jest zdefiniowany jako iloraz skutecznej wartości składowej zmiennej napięcia zasilającego oraz składowej stałej wyprostowanego napięcia. Największy współczynnik posiada układ półokresowy t = 1,21, natomiast układ pełnookresowy posiada wartość tego współczynnika na poziomie t = 0,48.
Filtry wygładzające
Napięcie, które występuje bezpośrednio na wyjściu układu prostowniczego wraz z obciążeniem rezystancyjnym posiada pulsacyjny charakter. Aby zmniejszyć tętnienia na obciążeniu, należy pomiędzy wyjście prostownika, a obciążenie dołączyć filtr dolnoprzepustowy, zwany również filtrem całkującym lub wygładzającym. kilka przykładów filtrów dolnoprzepustowych pokazanych jest na poniższych rysunkach.

Najprostszy filtr dolnoprzepustowy przedstawiony na rysunku a) zawiera jedynie kondensator. Pomimo swojej prostoty filtr ten cechuje się wysoką skutecznością tłumienia tętnień napięcia. Im większa pojemność kondensatora, tym większa skuteczność działania filtru. Z powodu zależności pojemności danego kondensatora od jego rozmiarów, aby zminimalizować rozmiary filtru stosowane są kondensatory elektrolityczne, których pojemność jednostkowa jest największa. Filtr z rysunku a) stosowany jest powszechnie w układach zasilających małej mocy. Należy zastanowić się nad działaniem prostownika półokresowego wyposażonego w prosty filtr pojemnościowy obciążonego czystą rezystancją. Obecność kondensatora C, który połączony jest równolegle z rezystorem RL powoduje płynięcie prądu przez diodę D tylko w krótkich okresach, kiedy ona przewodzi, ładując tym samym kondensator do napięcia identycznego z napięciem zasilania UI prostownika. Rozładowywanie kondensatora z kolei następuje poprzez rezystor obciążenia w dłuższym czasie, w którym dioda nie przewodzi. W wyniku tego działania zmiany napięcia wyjściowego odkładanego na obciążeniu są znacznie niższe niż w układzie bez filtru wygładzającego. Znacznie większa jest również średnia wartość napięcia wyprostowanego, która jest bardzo bliska maksymalnej wartości napięcia zasilającego. Znacznie mniejsze są tętnienia napięcia. Wadą układu jest zwiększanie napięcia wstecznego na diodzie, które osiąga dwukrotną wartość szczytowego napięcia zasilającego. Jakość filtracji zależy w dużym stopniu od obciążenia prostownika. Przykładowo, kiedy natężenie prądu w obciążeniu rośnie na skutek zmniejszenia rezystancji obciążenia RL, powoduje to tym samym silniejsze rozładowanie kondensatora. Idąc dalej tym tropem następuje wydłużenie czasu ładowania oraz zwiększenie prądu ładowania kondensatora, w związku z czym tętnienia wyjściowego napięcia stają się większe. Zjawisku temu można przeciwdziałać poprzez stosowanie kondensatora o większej pojemności, prowadzi to jednak do zwiększenia szczytowej wartości prądu przewodzenia diody. Znacznie lepsze rezultaty można uzyskać stosując prostownik pełnookresowy, ponieważ identyczne jakościowo zjawiska powtarzają się dwukrotnie w czasie pojedynczego okresu prostowanego przebiegu. Niezależnie od stosowanego układu, najbardziej niekorzystne dla diody warunki pracy występują w momencie włączenia napięcia zasilania, kiedy kondensator C jeszcze nie jest naładowany. Wtedy bowiem przez diody, które przewodzą płynie bardzo duży prąd, który wstępnie ładuje kondensator ograniczony tylko niewielkimi rezystancjami szeregowymi komponentów, które znajdują się w obwodzie prostownika. Należy więc starannie dobierać elementy, aby zapobiec ewentualnemu uszkodzeniu układu. Aby zmniejszyć impuls prądu występującego zaraz po uruchomieniu układu, celowo wprowadza się w obwód prostownika szeregowo rezystor o stosunkowo niewielkiej wartości rezystancji.
Filtry wygładzające, które zawierają jedynie cewkę indukcyjną, jak filtr z rysunku b), stosowane są bardzo rzadko. Stosowane są właściwie jedynie w pełnookresowych układach wielofazowych o dużej mocy. Stąd wynika, że skuteczność tego filtru, czyli odpowiednie zmniejszenie tętnień jest tym większe im mniejsza jest rezystancja obciążenia, a co za tym idzie także pobierana moc. Częściej stosowane są filtry LC, takie jak filtry typu L pokazane na rysunku c) oraz filtry typu p pokazane na rysunku d). Poprzez odpowiedni dobór elementów L oraz C tych filtrów możliwe jest uzyskanie znaczącego zmniejszenia tętnień oraz stosunkowo małe zmiany napięcia wyjściowego w dosyć dużym zakresie zmian natężenia prądu obciążenia. Wadą filtrów LC jest duża masa oraz rozmiar cewki indukcyjnej, szczególnie w przypadku układów pracujących w przedziale częstotliwości od 50 Hz do 200 Hz. Przy projektowaniu układów pracujących w częstotliwościach od 20 kHz do 300 kHz filtry tego typu są chętnie wykorzystywane, zwłaszcza w zasilaczach impulsowych. Dzieje się tak za sprawą cewki indukcyjnej która może być niewielkich rozmiarów przy pracy w wyższych częstotliwościach. W zasilaczach niewielkiej mocy często stosowanymi filtrami są filtry wygładzające RC, których przykład przedstawiono na rysunku e). Pomimo powszechnego stosowania charakteryzują się one niezbyt dobrą skutecznością filtrowania, a przy tym znacząco uzależniają wartość napięcia wyjściowego od natężenia prądu obciążenia, co jest zasługą dodatkowego spadku napięcia na rezystorze wchodzącym w skład filtru. Znaczącą poprawę zarówno filtracji jak i napięcia wyjściowego można uzyskać przez odpowiednie wykorzystanie stabilizatorów elektronicznych.
Stabilizatory
Podstawowy schemat stabilizatora

Stabilizator elektroniczny jest układem służącym do wytworzenia na swoim wyjściu określonej wartości prądu lub napięcia, która nie jest zależna od zmian wejściowej wielkości napięcia i obciążenia, a także od zmian temperatury. Opisane wyżej cechy posiada stabilizator ideowy, który nie jest jednak możliwy do skonstruowania. Przejściowe charakterystyki rzeczywistych i idealnych stabilizatorów są pokazane na poniższych rysunkach.
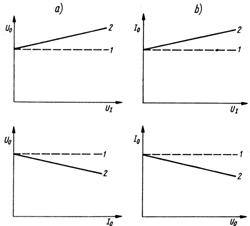
- charakterystyki wyjściowe U0 ( I0 ) i przejściowe U0 ( II ) stabilizatora napięcia
- charakterystyki wyjściowe U0 ( I0 ) i przejściowe U0 ( II ) stabilizatora prądu
- charakterystyka idealnego stabilizatora
- charakterystyka rzeczywistego stabilizatora
Rzeczywisty stabilizator potrafi utrzymać zadaną wielkość wyjściową napięcia w z góry założonym zakresie tolerancji. Wprowadzono szereg współczynników, które określają podatność na zmiany napięcia wyjściowego pod wpływem zaistnienia rozmaitych czynników. Współczynniki podawane przy stabilizatorach napięcia:
- SU = ΔU0 / ΔUI - współczynnik stabilizacji napięcia,
- R0 = ΔU0 / ΔI0 - wartość rezystancji wyjściowej,
- TWU = ΔU0 / ΔT - współczynnik temperaturowy zmian napięcia wyjściowego,
- WTT = ΔUIt / ΔU0t - współczynnik tłumienia tętnień.
W powyższych wzorach wartości DI0, DT, DUI, DU0,są wartościami bezwzględnymi zmian odpowiednio wyjściowego prądu I0, temperatury T, wejściowego napięcia UI oraz wyjściowego napięcia U0. ΔUIt oraz ΔU0t są międzyszczytowymi wartościami napięcia tętnień na wyjściu i wejściu. Do najważniejszych współczynników stabilizatorów napięcia należą ponadto:
- poziom stabilizowanego napięcia wyjściowego U0 oraz dopuszczalny zakres jego regulacji,
- poziom napięcia wejściowego UI oraz dopuszczalny zakres jego zmian,
- wartość maksymalna prądu obciążenia I0max lub prądu zwarcia I0z,
- maksymalna moc PMAX.
Poza tymi parametrami podawać można jeszcze inne parametry, które dotyczą szumowych właściwości, właściwości temperaturowych, impulsowych, długotrwałej stabilności oraz warunków pracy.
Stabilizatory prądu i napięcia stałego, które używane są do zasilania układów elektrycznych można podzielić, pod względem zasady działania, na dwie podgrupy: stabilizatory parametryczne, które nie działają w oparciu o sprzężenie zwrotne, oraz stabilizatory kompensacyjne, które wykorzystują sprzężenia zwrotne.
Parametryczne stabilizatory potrafią utrzymać stałą wartość napięcia wyjściowego, dzięki odpowiedniemu zastosowaniu elementu, którego charakterystyka prądowo napięciowa wykazuje w pewnym przedziale stałość swojego przebiegu w funkcji prądu i napięcia. Powszechnie stosowanymi elementami stabilizacyjnymi są diody stabilizacyjne, zwane potocznie diodami Zenera. Czasami stosuje się również warystory lub termistory.
Poniższy rysunek przedstawia najbardziej elementarny układ stabilizatora parametrycznego oraz charakterystyki prądowo - napięciowe tego układu
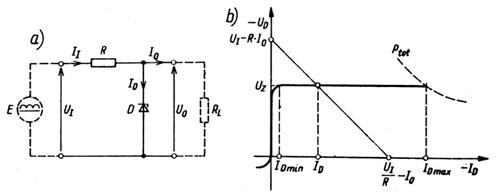
Stabilizacyjne działanie układu zaopatrzonego w diodę Zenera polega na tym, iż wszystkie zmiany, w granicach stabilizacji diody, tak napięcia wejściowego jak i natężenia prądy obciążenia wywołują zmianę prądu, który płynie przez diodę. Zmiana napięcia wejściowego równoważona jest zmianą spadku napięcia odłożonego na rezystorze R, która powstaje na skutek zmiany prądu diody, zaś zmiana prądu obciążenia równoważona jest zmianą prądu diody, przy czym spadek napięcia na rezystorze R jest wartością stałą. Na skutek działania układu wyjściowe napięcia stabilizatora określone jest napięciem stabilizacyjnym diody Zenera - UZ. Pozostaje ono w zasadzie bez zmian, ponieważ w rzeczywistym układzie poziom napięcia wyjściowego ulega zmianie w zakresie, który wynika z nachylenia nieidealnej charakterystyki prądowo - napięciowej diody Zenera. Opisywany układ pomimo prostych rozwiązań konstrukcyjnych posiada wiele wad. Charakteryzuje się on między innymi dużymi stratami mocy na diodzie D oraz na rezystorze R, niewielką dokładnością stabilizacji oraz brakiem możliwości regulacji wartości napięcia stabilizacji. Nadmierne straty mocy mogą zostać zmniejszone poprzez odpowiednie zastosowanie tranzystora jak na rysunku poniżej.
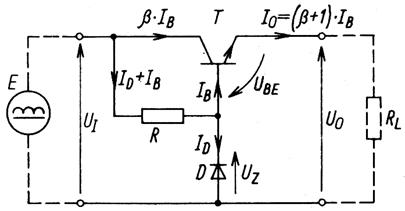
Tranzystor T pracuje jako wtórnik napięcia, przejmując cały prąd wpływający do obciążenia w taki sposób, że przez rezystor R przepływa jedynie niewielka część prądu obciążenia, jest ona bowiem porównywalna z prądem bazy tranzystora IB. Wyjściowe napięcie określone jest wartością napięcia stabilizacji UZ diody Zenera, która jest pomniejszona o niewielki spadek napięcia na złączu baza - emiter tranzystora T - UBE. Ponieważ wartość napięcia UBE ulega ciągłym zmianom w miarę przepływu prądu obciążenia płynącego przez tranzystor i może dochodzić do nawet 1V, stabilność napięcia wyjściowego w opisywanym układzie jest gorsza od układu opisywanego wcześniej. Możliwe jest uzyskanie dosyć dużego zmniejszenia napięcia tętnień na wyjściu poprzez zastosowanie rezystora R, charakteryzującego się dużą wartością rezystancji.
Lepsze właściwości od stabilizatorów parametrycznych posiadają stabilizatory kompensacyjne. Posiadają one element regulacyjny, który jest wrażliwy na wartość sygnału doprowadzanego z układu sterującego. Każda zmiana poziomu napięcia wyjściowego kompensowana jest poprzez odpowiednie wysterowanie elementu regulacyjnego, w wyniku czego wartość napięcia wyjściowego utrzymywana jest na stałym poziomie.
Stabilizatory napięcia o działaniu ciągłym umożliwiają uzyskanie lepszej stabilizacji wyjściowej wartości oraz najmniejsze możliwe do uzyskania tętnienia, ale także w przeciwieństwie do stabilizatorów impulsowych charakteryzują się małą sprawnością. Przykładowy schemat stabilizatora napięcia o ciągłym działaniu przedstawiony jest na poniższym rysunku.
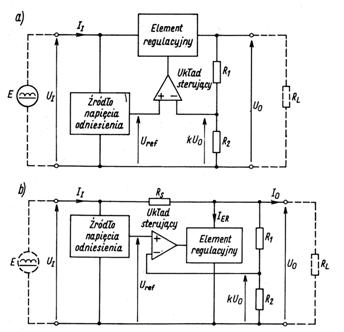
a. Stabilizator szeregowy, którego element regulacyjny połączony jest szeregowo z obciążeniem.
b. Stabilizator równoległy, którego element regulacyjny połączony jest równolegle z obciążeniem.
Równoległe stabilizatory napięcia stosowane są niezmiernie rzadko, głównie z powodu swojej małej sprawności, powodem tego stanu rzeczy są duże straty mocy występujące na rezystorze RS. Stabilizacyjne działanie układu kompensacyjnego, w który zaopatrzony jest stabilizator napięcia ze sprzężeniem zwrotnym polega na tym, że przy każdej zmianie napięcia wejściowego lub rezystancji obciążenia, porównaniu ulega stabilizowane napięcie wyjściowe, lub jego część, z wzorcowym napięciem odniesienia UREF oraz wysterowaniu różnicą poziomów tych napięć ulega element regulacyjny. Wysterowanie elementu regulacyjnego odbywa się w taki sposób, aby zmiana poziomu napięcia odłożonego na nim na skutek zmiany jego rezystancji stanowiła przeciwwagę zmianom poziomu wyjściowego napięcia stabilizowanego.
Regulacyjnym elementem stabilizatora szeregowego, którego napięcie wyjściowe może być regulowane, jest szeregowo połączony z obciążeniem RL tranzystor T1. W części układu w której znajduje się tranzystor T2 odbywa się porównywanie napięcia odniesienia UREF, które jest zarazem napięciem stabilizacyjnym diody Zenera UZ, z pewną częścią wyjściowego napięcia U0, która ustalana jest potencjometrem P. Różnica tych napięć podawana jest po wzmocnieniu na bazę tranzystora T1. Możemy stwierdzić, że stabilizator działa poprawnie, jeżeli każdy tranzystor pracuje w aktywnym zakresie, natomiast dioda Zenera pracuje w zakresie stabilizacji napięcia. Jakość uzyskiwanej stabilizacji napięcia zależy w dużej mierze od wartości wzmocnienia jakim charakteryzuje się układ sterujący, w naszym przypadku chodzi o tranzystor T2. Im większa wartość wzmocnienia, tym stabilizacja napięcia wyjściowego jest lepsza przy zmianach rezystancji obciążenia oraz napięcia wejściowego. Stabilizatory wysokiej klasy wykorzystują bardzo rozbudowane, wielostopniowe zespoły układów sterujących i porównujących, które złożone są z indywidualnych elementów. W obecnych czasach w powszechnym użyciu wykorzystuje się w zasadzie już tylko tanie i wydajne układy scalone.
Poniższy rysunek stanowi przykład Stabilizatora szeregowego charakteryzującego się regulowanym napięciem wyjściowym

